NUESTRO CENTRO
El centro en el que realizamos este proyecto, Anna Gironella de Mundet, tiene una gran cantidad de ofertas educativas, entre las cuales se encuentra el grado superior de automatización y robótica industrial. Esta formación nos permite combinar la teoría con la práctica llevando a cabo proyectos como el de Asti Robotics.
RETOS Y SOLUCIONES DEL CONCURSO
- Cuadrícula
- 3 sensores seguidores de líneas infrarrojos, uno situado debajo del eje central del coche encargado de evitar que se salga de la línea, y en cuanto a los 2 sensores que restan pondremos uno en cada lado para que cuenten los pulsos de cada lado de la cuadrícula. Así podremos calcular la distancia a recorrer y la recorrida.
- Barredora
- Usando los sensores ultrasonido acoplados en el vehículo que nos permitirán circular usando las paredes como información, programaremos una trayectoria eficiente cubriendo la mayor parte de la pista posible. Además diseñaremos una pala que instalaremos en la parte delantera del coche para recoger el máximo material posible sin perderlo al girar.
- Minifábrica
- A primera vista este es la prueba más compleja en cuanto a programación, así que optariamos por la opción de controlarlo remotamente dejando como parte programable la subprueba de abrir y cerrar la barrera mediante relés cuando el robot tenga que interactuar con esta.
- Mini laberinto
- Usando los sensores ultrasonido acoplados en el vehículo que nos permitirán circular usando las paredes como información, y usando la cámara para distinguir entre los distintos colores podremos asegurarnos, programando in situ, que el robot termine en la zona que corresponde al objetivo establecido.
- Bolos
- Con la ayuda de un servo motor fijamos la pelota, ya que empujandola sería muy sencillo perder el control de esta, y usando la cámara calibrariamos la posición del coche delante de los bolos lo más centrada posible. Para lanzar la pelota usaremos la propia aceleración de nuestros motores.
- Liga Duelos
- Para este reto hemos planteado la idea de usar dos servomotores a los cuales uniremos dos lápices que estarán elevados hasta que con alguno de los sensores ultrasonido detectemos al robot enemigo, y en ese momento los bajaremos para tocar al contrincante.
DISEÑO 3D DEL COCHE
En primer lugar tenemos la estructura del vehículo.

En segundo lugar tenemos la estructura de la base donde irá situada la Raspberry.

En tercer lugar la cámara y su soporte.

Estructura completa.
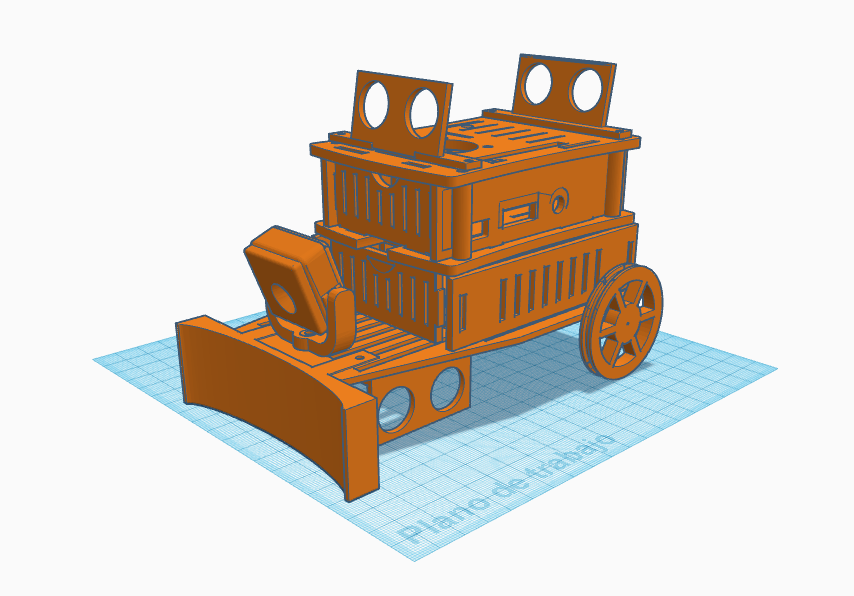
Possible modificación para la pala de la prueba de la excavadora.

MONTAJE DEL COCHE
Estructura inferior
Con las piezas del diseño 3D impresas empezamos el montaje del coche.
En primer lugar, instalamos la rueda delantera en la base donde irán sujetos los motores y las dos ruedas traseras. Esta rueda es más pequeña que las dos traseras y tiene juego para poder adaptarse a las reorientaciones en movimiento del coche.

Esta rueda, hemos decidido cambiarla por otra un poco más grande y más estable.

A pesar de que tenemos que fijarla en la base en posición diagonal, ya que no encajan los agujeros de la base con los agujeros de fijación del soporte de la rueda, la estabilidad proporcionada sigue siendo mayor que con el anterior prototipo.
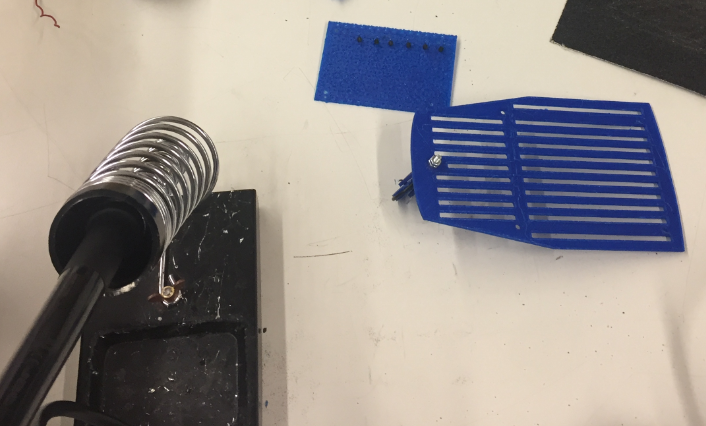
A continuación soldamos en una placa de PLA 16 pines en dos líneas de 8 pines, una a 0 voltios y la otra a 5 voltios. Esta nos servirá para conectar los sensores en un futuro, y sacaremos la alimentación de la propia raspberry PI.
Además, incorporamos las ruedas traseras y las respectivas escuadras de fijación a la base en cada motor, y soldamos también los cables de salida del motor para poder conectarlos al banco de relés con el que haremos el primer test y posteriormente al integrado con el que podremos modular las velocidades del coche.

El paso siguiente será fijar los motores y las ruedas a la base.

Decidimos cambiar las ruedas traseras por unas más grandes que como sucede con la rueda delantera anterior, también son más estables.

Estructura superior
Para la estructura superior, como se puede apreciar en el diseño del coche, disponemos de dos compartimentos, uno encima del otro separados por una plancha igual a la de la estructura inferior, en los que colocaremos la raspberry, los cables, la placa soldada, la cámara de visión y los sensores.

Esto no nos lleva mucho trabajo, ya que tan solo tenemos que fijar los dos compartimentos y la segunda plancha a la estructura inferior, usando 4 tornillos y las tuercas necesarias.
En cuanto a la cámara de visión, también diseñamos su propio soporte de acoplamiento al coche.

La raspberry irá situada en el compartimento superior donde la estructura ya está diseñada para poder conectar la placa a una pantalla o simplemente alimentarla con facilidad. En el compartimento inferior guardaremos el cableado y la placa soldada con 16 pines.

Acabados e integrado
Una vez probado el funcionamiento del coche con el control de los motores por relés, la siguiente tarea será incorporar el integrado, modificar el programa de control de los motores y acabar de pulir el carro estéticamente hablando.

En cuanto al integrado, usamos un L293D.
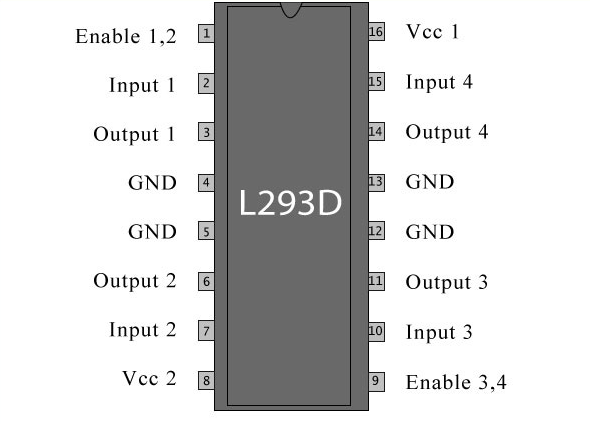
Como se puede observar, disponemos de 4 outputs para los dos motores, y dos enables situados en los pines 1 y 9 que asignaremos a dos pines de la raspberry para modular las velocidades.

Para finalizar guardamos todo el cableado dentro del compartimento inferior, aunque aún no hemos conectado los sensores, lo que significa que en un futuro tendremos que desmontarlo otra vez.

PROGRAMACIÓN
Frames pantalla




Las últimas líneas comentadas nos dieron problemas en la compilación, creemos que no deberían suponer ningún problema, así que más adelante nos centraremos en investigar la razón del error.
Control motores



CRONOGRAMA DE DESARROLLO

Presupuesto
| Material | Cantidad (u) | Precio €/u | Precio total (€) |
|---|---|---|---|
| PLA piezas | 1 | 60,11 | 60,11 |
| EL0512 Motor | 2 | 2,95 | 5,90 |
| EL0431 SENSOR DE DISTANCIA ULTRASONIDO HC-SR04 | 4 | 1,25 | 5,00 |
| EL0484 SIGUELÍNEAS TCRT5000 INFRARROJO IR | 3 | 1,50 | 4,50 |
| EL0442 MÓDULO CÁMARA ARDUINO 300KP | 1 | 6,40 | 6,40 |
| Placa RASPBERRY PI | 1 | 44,99 | 44,99 |
| Bateria portable | 1 | 36,99 | 36,99 |
| Integrado L293D | 1 | 1,94 | 1,94 |
| Pilas 1,5V | 4 | 0,715 | 2,86 |
| TOTAL | 168,69 |
El material y los elementos han sido financiados por la escuela y los propios miembros del equipo.
